Installation
Raspberry Pi Imager : https://www.raspberrypi.com/software/
Doc Mainsail : https://docs.mainsail.xyz/
Fichier de configuration imprimante : https://github.com/Klipper3d/klipper/tree/master/config
Firmware update pour TRONXY V6 SEULEMENT F103 : https://gist.github.com/cab404/b7bcbb0cd592a14515493694719de59b
Groupe sur Klipper : https://klipper.discourse.group/
Dans Raspberry imager :
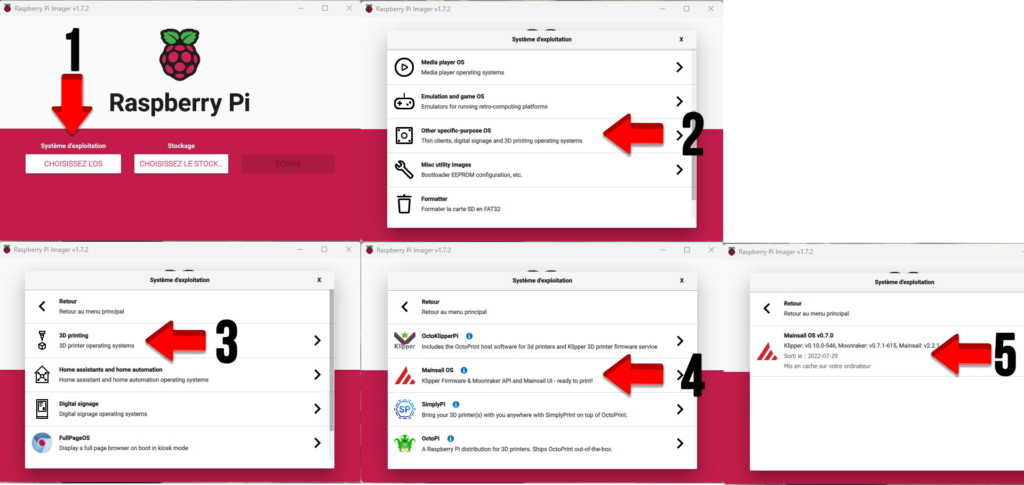
1 – Choisir l’os
2 – Other specific-purpose OS
3 – 3d Printing
4 – Mainsail
5 – Mainsail (dernière version mis à dispo)
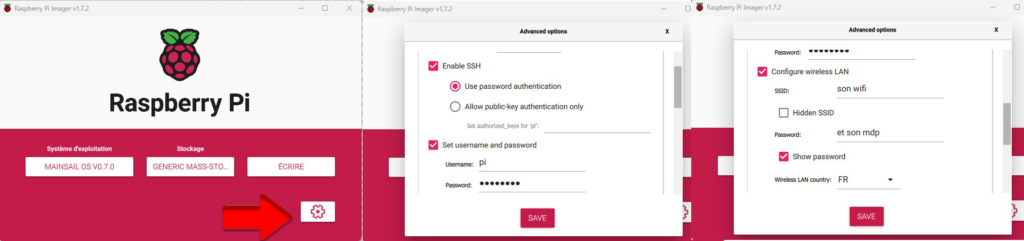
On choisis son espace de stockage ( une 8Gb minimum)

On remplis les paramètre wifi et password , même si dans mon cas , cela ne marche pas à tout les coups…
Dans le cas ou le wifi ne marche pas , vous pouvez éditer le fichier présent sur la carte : mainsailos-wpa-supplicant.txt et modifié la partie :
country=fr
update_config=1
ctrl_interface=/var/run/wpa_supplicant
## WPA/WPA2 secured
network={
ssid="votre wifi"
psk="votre mdp"
} et l’enregistrer .
Il est conseillé de mettre a jour le raspberry après installation de l’image avec :
sudo apt-get update && sudo apt-get -y upgrade && sudo apt-get -y dist-upgrade
sudo rpi-update
sudo rebootVous en aurez peu être besoin plus tard , mais vous pouvez donner les droit a Pi pour certaine commande que nous verrons plus tard avec la ligne suivante : sudo usermod -a -G tty pi
Connectez vous maintenant avec l’adresse ip à klipper
Dans le menu machine :
– créer un fichier printer.cfg avec au minimum la ligne :
Vous pouvez en retrouver certain que nous avons créer ici : https://egamaker.be/nos-printer-cfg-pour-klipper/
[include mainsail.cfg]
pour que klipper se connecte au minimum a votre machine
Ensuite vous aurez besoin du contenue dispo ici : https://github.com/Klipper3d/klipper/tree/master/config
Pour calibrer la distance de rotation , vous retrouverez les information de calcul : https://github.com/Klipper3d/klipper/blob/master/docs/Rotation_Distance.md
Calibration
Rotation distance Extrudeur :
commande :
G91
G1 E100 F60
Calcul :
Initial distance : (marque a 150 )
Request : valeur du E
Subsequence : ce qui rese hors extru
Actual distance : Initial – Subsequence
Valeur rotation :
(Rotation du fichier * actual distance ) / request = nouvel valeur rotation
Z-Offset :
G28
PROBE_CALIBRATETESTZ z=-5 (valeur voulu en + ou - ) SAVE_CONFIGVous pouvez ensuite lancer une calibration dans la partie maillage
Donnez lui un nom ex : plateau
une fois fini faites un SAVE_CONFIG vous pourrez faire appel à se mesh en ajoutant dans le gcode [plateau]
Guide de calibration fournis par Pierro3d85 pour les SR et Delta :
PID :
Pour l'extrudeur :
PID_CALIBRATE HEATER=extruder TARGET=215
après calibration :
SAVE_CONFIG
Pour le Bed :
PID_CALIBRATE HEATER=heater_bed TARGET=65
après calibration :
SAVE_CONFIG
Pressure advance :
vous aurez besoin de se fichier à imprimer : https://www.klipper3d.org/prints/square_tower.stl
La doc complète : https://www.klipper3d.org/Pressure_Advance.html
Dans votre slicer :
Vitesse : 100
Remplissage: 0%
Hauteur de couche : 75% de votre buse. Exemple une buse de 0.4 hauteur 0.3
Accélération et saccade désactivé
Commande a lancer dans la console de Klipper :
SET_VELOCITY_LIMIT SQUARE_CORNER_VELOCITY=1 ACCEL=500Pour les Direct Drive/ Titan :
TUNING_TOWER COMMAND=SET_PRESSURE_ADVANCE PARAMETER=ADVANCE START=0 FACTOR=.005
Pour les Bowden :
TUNING_TOWER COMMAND=SET_PRESSURE_ADVANCE PARAMETER=ADVANCE START=0 FACTOR=.020
Selon votre résultat , le calcul est :
la hauteur X le facteur direct drive ou bowden ( Exemple pour le direct drive : 27.4X0.005 = 0.137)
Dans le fichier printer.cfg dans la section Extruder ajoutez la ligne :
pressure_advance = 0.137
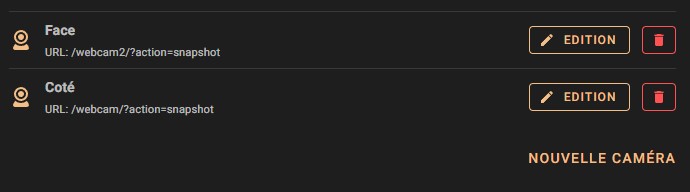
Multi-Cam :
Vous avez la possibilité de placer jusque 4 camera dans Klipper
Editez le fichier crowsnet.conf qui se trouve dans la partie machine de cette façon :
[cam 1] # changez le numero en rapport avec votre cam
mode: mjpg # mjpg/rtsp
port: 8080 # Port 8080/8081/8082 selon le numero de cam
device: /dev/video0 # video0/1/2/ selon le numero de cam
resolution: 1280x720 # widthxheight format
max_fps: 20 # If Hardware Supports this it will be forced, ohterwise ignored/coerced.
#custom_flags: # You can run the Stream Services with custom flags.
#v4l2ctl:
[cam 2] # changez le numero en rapport avec votre cam
mode: mjpg # mjpg/rtsp
port: 8081 # Port 8080/8081/8082 selon le numero de cam
device: /dev/video1 # video0/1/2/ selon le numero de cam
resolution: 1280x720 # widthxheight format
max_fps: 20 # If Hardware Supports this it will be forced, ohterwise ignored/coerced.
#custom_flags: # You can run the Stream Services with custom flags.
#v4l2ctl:
Dans les réglage section caméra : remplacez l’adresse URL en y ajoutant le numéro de la camera
Bonus : Ajoutez la température du Raspberry dans le tableau de température :
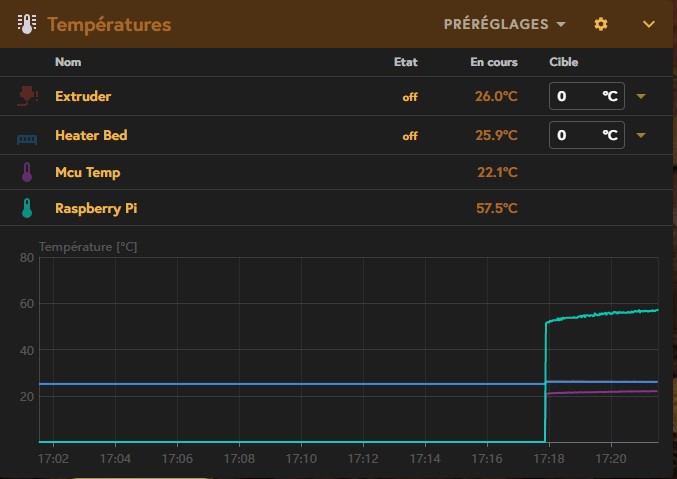
Ajoutez les lignes suivantes dans le fichier printer.cfg
[temperature_sensor raspberry_pi]
sensor_type: temperature_host
min_temp: 10
max_temp: 100
[temperature_sensor mcu_temp]
sensor_type: temperature_mcu
min_temp: 0
max_temp: 100Marlin vers Klipper – Klipper vers Marlin
Soyez encore une fois bien conscient que cela peu être un risque et que vous disposez bien de tout le nécessaire en cas de problème au moment du flash de votre machine
VERS KLIPPER
Pour créer le fichier update.cbd nécessaire pour la TRONXY X5SA avec un terminal comme Putty ou Moba ou …. :
cd ~/klipper/
make menuconfigDans le menu pour les cartes F103(V6)

pour les cartes F446(V10)
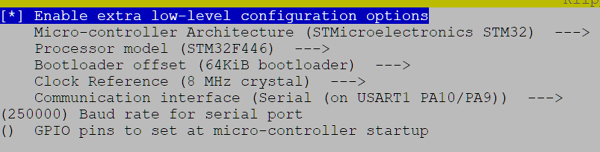
Quittez le menu avec la touche Q et validez avec Y
Lancez ensuite la compilation avec la commande :
Pour flasher la machine 2 solutions :
1- Via Klipper :
make clean
make
Vous aurez besoin de connaitre le port utiliser entre Klipper et la machine ( celle-ci doit être câblé et allumé 😉 )
ls /dev/serial/by-id/*
Récupérer le resultat : usb-1a86_USB_Serial-if00-port0
Ensuite il faut couper le service Klipper , flasher , et relancer le service :
sudo service klipper stop
make flash FLASH_DEVICE=/dev/serial/by-id/usb-1a86_USB_Serial-if00-port0 "remplacer /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0 par votre port usb"
sudo service klipper start
2 – Par carte SD
makePour les cartes F103(V6) , il reste la conversion en cbd
./scripts/update_chitu.py ./out/klipper.bin ./out/update.cbdVous pouvez maintenant récupérer le fichier update.cbd et le placer sur la racine de votre carte SD et démarrer votre machine.
L’écran restera noir après les 2 BIP ; vous pouvez maintenant vous connecter a la machine par Klipper.
Pour les carte F446 , récupérez le fichier klipper.bin qui se trouve dans le dossier : klipper/out/
Sur votre carte SD , dans un dossier update , placé le contenue du firmware d’origine
renommer le fichier klipper.bin par le nom du fichier de votre firmware ( exemple de la X5SA : fmw_X5SA-og.bin)
Voici 2 fichiers de firmware d’origine :
Les fichiers printer.cfg pour V6 et V10 : https://tronxy.fandom.com/wiki/Installing_Klipper#F446_(V10)_motherboard_Printer.cfg
VERS MARLIN
Vous aurez besoin de vos fichier d’origine et/ou votre compilation Marlin
Si vous désirez revenir sur le firmware original Tronxy et que vous ne disposez pas des fichier , il vous faudra les demander directement au support à l’adresse : support@tronxy.com
Car il en manque énormément sur leur page : https://www.tronxy.com/marlin-firmware-for-tronxy-3d-printer/
Vous pourrez peu être aussi en trouver ici : https://www.thingiverse.com/groups/tronxy/forums/general/topic:33023
votre dossier doit ressembler à peu près a ceci :

Cela marche pour les carte V6 et V10